현재 자율주행 품질 및 정확성 향상을 위한 노력으로 미래 완전 자율주행의 연결성 및 안전성 수준이 결정되는 자율주행차량의 시각정부 수집에 대한 효과적인 센서를 찾는 논란이 계속되고 있으며 센서 융합은 주변 환경을 정확하고 종합적으로 이해하는데 도움이 되는 차량 운행 및 데이터 학습의 병행을 통해 용이한 데이터 이해가 가능하고 모델의 정확도 증가에 비례하여 수준을 유지하는 것이
○ 배경 – 2016년 말부터 자율주행 산업에 대한 견해가 현저하게 변화하여 2020년까지 자율주행은 상위 차량 메이커의 공통목표였다 – 최근 한 기사는 세계 11대 차량 메이커가 자율주행의 흐름을 거스를 수 없다는 의견에 동의하지만, 예상보다 늦게 성과를 보인다는 의견을 게시한다 – 3단계 및 4단계 자율주행 기술을 확보하고 자율주행 차량의 개발을 지연시킬 필요성능의 3가지, 성능지연성능의 데이터 종류 및 4단계 자율주행 기술 확보하여 자율주행 차량 개발을 완료하였다.
○센서 패키지의 복잡함
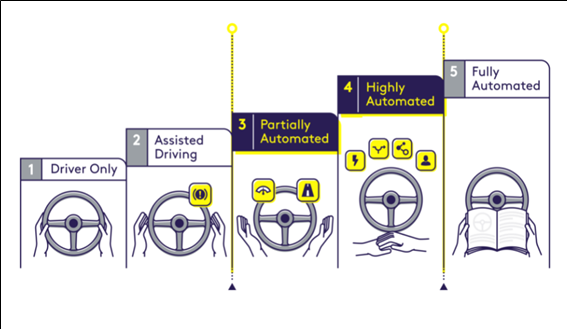
[그림 1] 자율주행기술 개발단층- 자율주행차량에 대한 시각정보를 수집하는데 가장 효과적인 센서를 찾는 논란이 계속되고 있다-1단계 및 2단계 자율주행차량의 경우 카메라와 레이더 센서는 사각지대 방지 및 장애물(차량)과의 거리측정에 필수적이다- 차량 제조사는 다음 단계의 차량 개발을 위하여 카메라, 레이더 및 러이다. 데이터의 결합(즉 센서 융합)을 유지하는 데 필요한 비용 및 처리 능력 구비에 힘쓴다 – 개발 단계와는 별도로 차량 소프트웨어 모델 개발의 주요 과제는 모든 상황의 극단적인 경우를 세는 것 설명 1 카메라에 들어오는 빛의 처리 방법 2 고속도로에서 감지해야 하는 벽돌 등의 작은 물체에 대한 반응 3 센서 중복 발생 시 문제 해결 방법 4 대형 금속 물체가 다른 센서에 의해 오인됨 탐지범위와 갱신빈도가 향상되어 차량의 근접감지 기능을 개선할 수 있다.
○ 필요한 교육 데이터의 양 및 다양성- 자율주행차 및 시스템은 교육 데이터에 의존하여 발생 가능한 상황 및 대응 방법에 대해 학습하기 때문에 머신러닝 모델이 다수의 고품질 데이터를 학습할수록 우수해진다- McKinsey Global Institute는 AI 시스템 3가지 중 1가지 모델을 최소 매월, 경우에 따라 매일매일 업데이트해야 한다- McKinsey Global Institute는 AI 시스템 3가지 중 1가지의 집중력 및 민첩성을 통해 민첩하게 될 수 있는 모델을 최소 매월, 최소 최소 1개 모델 업데이트해야 한다
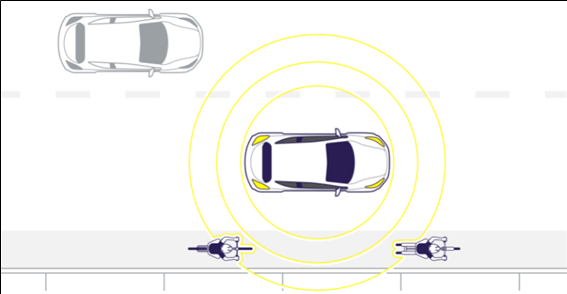
[그림 3]자전거와 삼륜차를 식별하는 자율 주행 차량-분류 체계는 자전거와 삼륜차 등 극단적 사례 및 이해 관계의 하위 속성 식별이 가능해야 한다-관련 메타 데이터 레벨을 사용할 경우 데이터 세트 분류 및 인과 관계를 고려한 파악이 가능하기 때문에 새롭고 특이한 운전 환경에 대한 데이터 세트의 신속한 수정에 의해서 차이를 쉽게 알아볼 수-데이터 수집에서 센서 유형을 고려하는 경우와 마찬가지로 올바른 아베 레이션 툴을 선택 시처럼 보다 안정적으로 안정된 운전이 가능 예를 들면, 폴리곤 사용 시 2D box보다 정확한 경계 정의가 가능-이미지인당 레이블 수를 단순화하고 오류를 최소화하거나 복잡한 워크 플로를 여러 단계로 나눈 뒤 마지막으로 결과를 병합한 레벨 지정 작업 흐름을 설계할 경우, 정확성을 극대화할 수 있다 – 조직 내 데이터 품질에 대한 정량화된 인식을 개선하는 것은 세계적 수준의 교육 데이터 파이프라인 구축에 필수적이며 엄격한 데이터 품질 기준은 모든 사람이 동일한 정보를 접할 수 있도록 지원하는 설명 1심각 전반의 품질을 평가하는 프로세스 – 품질 기준뿐만 아니라 엄격한 품질보증 프로세스를 구축할 때 지침 및 극단적인 사례의 차이를 식별하는 것과 신속한 문제 해결에
안전한 자율주행차 출시
○ 자율주행차량의 안전성에 대한 권장사항 – 자율주행기술 개발의 핵심은 빠른 속도, 정확성, 신뢰성이며, SAMA는 자율주행산업에서 10년 이상의 경험 및 전문 지식을 축적한 데이터 어노테이션 파트너로서 안전한 자율주행차량의 시장 출시를 위한 권장사항을 제시한다 – 모델 개발에는 데이터가 수집되는 지역에서 2D, 3D 및 비디오 어노테이션에 대한 레이블의 여러 종류까지. 차선간 간격유지, 차선변경 및 고속도로 합류 등의 기본사항부터 시작하는 것이 각 기능을 동시에 향상시킬 수 없음을 의미하지 않는-기본교육 시나리오를 기초로 하여야 한다. 즉 주변에 차가 없는 상태에서 차선을 변경하려는 인간 운전자와 유사한 궤적 및 속도에 초점을 맞춘 뒤 차량의 인간 운전자와 비슷한 차선 변경이 가능해질 때까지 주변에 차량이 운행하는 상태에서 연습해야 한다-테스트 및 검증에 꾸준히 임해야 한다. 많은 예제를 연구해야만 머신러닝 알고리즘의 90%, 95% 및 99%의 품질을 얻을 수 있으며, 확실한 점은 컴퓨터 학습의 유효성 검증을 위해 실제로 운행해 보는 것이 자율주행 시스템 개선의 유일한 방법이라는 것입니다.
Published 2021
< 참고문헌 > SAMA , ” Training Data for Autonomous Driving ” , https://www.sama.com/training-data-for-autonomous-driving