요약 지능정보기술집약체 이동수단으로 본래 목적 구현 카메라, 레이더, 전력반도체, GPS 센서를 비롯한 V2X라는 독특한 통신시스템이 포함된다.정보수집→판단전력→차량제어 3단계 자율주행자동차(Self-Driving Car, Automous Vehicle)는 지능정보기술이 집약된 하나의 작은 사회이자 대표적인 사례이자 이동수단으로서 자동차 본연의 목적을 궁극적으로 실현한 시스템이다.기사 https://spri.kr/posts/view/21781?code=column
자율주행을 가능하게 하는 기반기술-SPRi 이번 호에서는 자율주행을 가능하게 하는 ‘주행환경 인식’ 관련 기반기술에 초점을 맞춰 살펴보고, 이들 기술을 활용해 구현할 수 있는 응용기술에 대해 알아보고자 한다.spri.kr
자율주행을 가능하게 하는 기반기술-SPRi 이번 호에서는 자율주행을 가능하게 하는 ‘주행환경 인식’ 관련 기반기술에 초점을 맞춰 살펴보고, 이들 기술을 활용해 구현할 수 있는 응용기술에 대해 알아보고자 한다.spri.kr

자율주행을 가능하게 하는 기반기술-SPRi 이번 호에서는 자율주행을 가능하게 하는 ‘주행환경 인식’ 관련 기반기술에 초점을 맞춰 살펴보고, 이들 기술을 활용해 구현할 수 있는 응용기술에 대해 알아보고자 한다.spri.kr
자동 운전, 전기 자동차 전기 자동차 충전 인프라 자동 운전 차량에 탑재되는 레이더 센서 카메라=자동 운전째의 전력 반도체-고온, 고압 환경에서도 잘 견딘다. 제2단락-자동 운전에 들어갔고 기술은 자동 운전 자동차는 센서(IoT)통신(Mobile및 Network)빅 데이터, 인공 지능 기술이 전부 결합한 객체이다. 완전 자동 운전이 가능하려면 위의 기술이 에러 같은 부작용이 없어 더욱 긴밀하게 융합되어야 한다. 자동 운전은 현재 첨단 드라이버 지원 시스템인 ADAS(Advanced Driver Assistance System)의 형태로 실현되고 있다. ADAS는 차량에 장착된 각종 센서와 카메라로부터 외부 환경 정보를 감지하고 이를 통해서 드라이버에 적절한 조치를 취하도록 알리거나 차량 자율 주행 제어를 하고 안전한 운전 환경을 제공한다.3단원-자동 운전 시스템 3단계 주변 환경 인식(정보 수집)판단, 주행 전략 수집(판단 전략)차량 제어
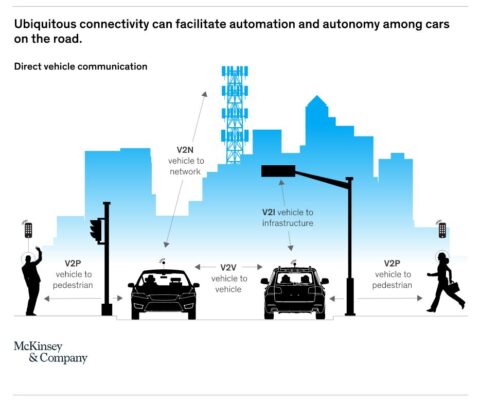
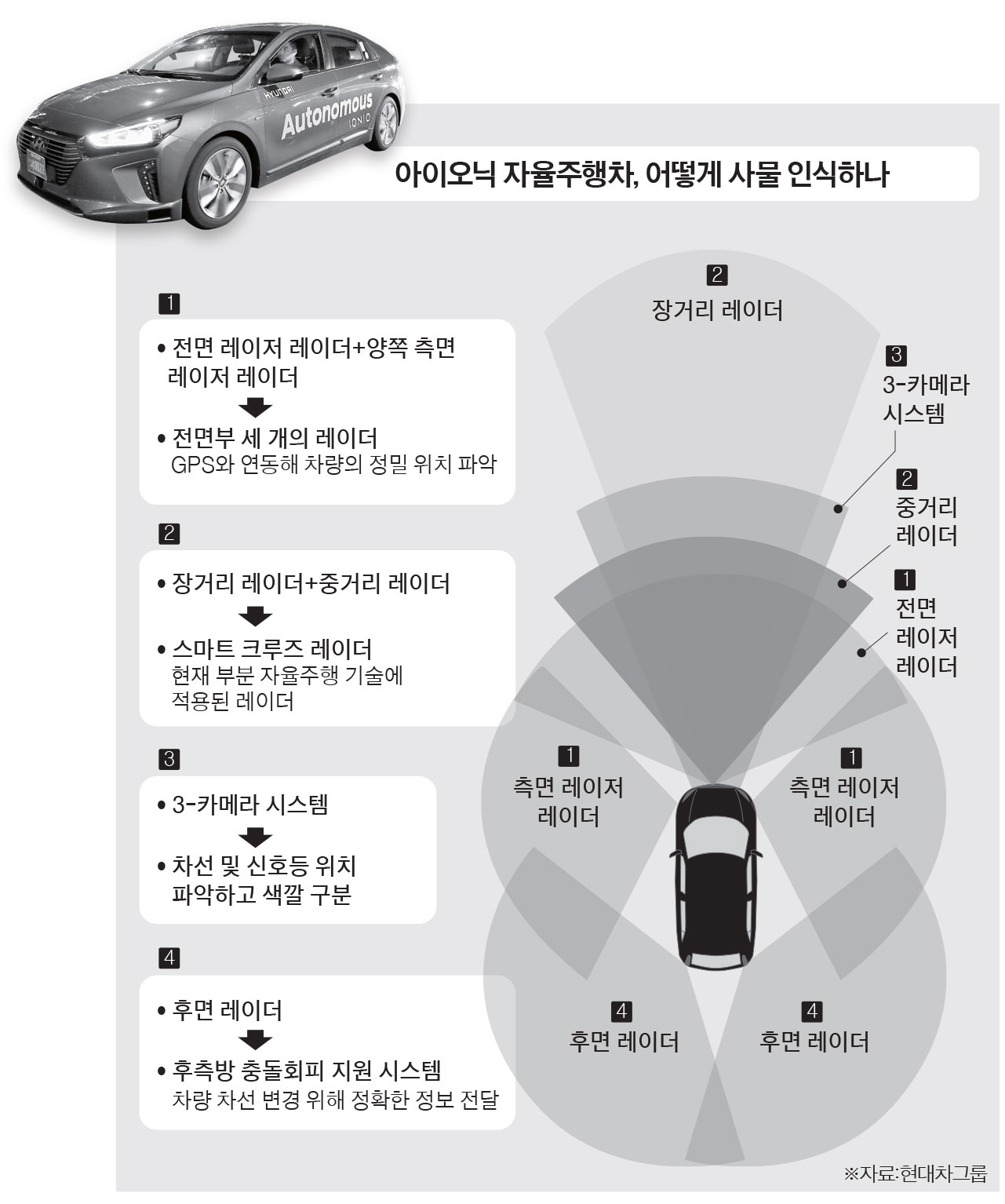
3단계로 나뉜다. 자동 운전 차”눈”을 담당하는 카메라와 센서 인식 속도가 가장 중요하다. 또 최근 기업에서 레이더 연구가 가장 활발하다.출처 자동 운전 자동차의 시스템은 우선 주행 환경에 대한 인식을 위한 정보 수집 수집된 정보에 따른 판단과 주행 전략, 그리고 차량 제어에 이어지는 구성으로 되어 있다. [그림 1]은 자동 운전 자동차의 시스템과 기반 기술을 나타낸다. 주행 환경을 인식하는 단계에서 각종 센서와 GPS(Global Positioning System), V2X(Vehicle to Vehicle, Vehicle to Infra등)통신 기술을 통해서 주변 환경과 경로를 탐색하는 단계다. 이후, 딥-러닝에 의한 빅 데이터 분석과 같은 알고리즘에 의한 판단/주행 전략 단계 최종적으로 차량을 제어하는 단계로 구성된다.스텝 1-환경 인식, 정보 수집에 들어가는 부품. 레이더 라이더 ⇒ 레이더와 라이더는 서로 다른 카메라 모노 카메라-렌즈 1개 스테레오 카메라-렌즈 2개 초음파 센서 적외선 센서 야간 운전 지원 물체 인식, 상황 판단 GPS-위치 정보 센서 V2X-차량 간 인프라 공유, 정보 수집 과정에서 들어가는 부품이 자동 운전 기술을 선도한다.소스 자동 운전을 위해서는 우선 차량의 곳에 장착된 센서에서 주변 정보를 수집하는 것이 필요하다. 자동 운전 때문에 필요한 센서는 여러 종류가 있지만 이들 센서는 크게 라이더(LiDAR)레이더(RADAR), 스테레오 카메라(Stereo Camera), 초음파 센서(Ultrasonic sensor)등으로 구분되며, 측정 범위(각도와 거리)에 의한 장착되는 위치와 역할이 바뀐다. 이들 센서는 자동 운전 차를 연구하는 업체로 각각 다양하게 조합되어 장착된다. 레이더와 라이더의 차이 레이더-물체에 전파를 발사하고 돌아온 반사파를 이용하고 떨어진 거리를 측정하는 부품 라이더-발사 매체가 전파가 아닌 빛(레이저 펄스)이다.레이더<라이다잉 이유 레이더 사용 주파수는 라디오 대역과 같다. 전파 특성상 금속 물질은 잘 반사한다. 그러나 비금속 물체는 반사율이 떨어지는 물체에서 반사 정도가 다르다.라이더는 직진성이 강한 빛을 사용한다. 레이더보다 탐색 거리는 가깝지만 매우 짧은 간격의 펄스 신호를 통해서 보다 높은 밀도에서 물체를 정확히 인식할 수 있다. 다만 라이더는 레이더보다 사물의 인식 거리가 짧다는 단점은 있다.다만 테슬라는 라이더. 대신 레이더를 사용한다.
카메라를 통한 주변 환경 인식>>출처 자동 운전을 위한 카메라에는 렌즈가 하나의 개인 모노 카메라(Mono Camera, 외눈 카메라)도 사용되지만 두개의 렌즈를 지닌 카메라 두대의 카메라를 하나로 묶은 형태의 스테레오 카메라(Stereo Camera)도 사용된다.스테레오 카메라는 사람이 두 눈을 통해서 거리를 인식하는 것과 같은 원리로 거리 정보를 계산한다. 이 과정에서 카메라 간의 국내외 변수를 추정하고 계산과 두개의 카메라에서 들어온 영상 내에서 서로 대응하는 위치를 찾아 스테레오 매칭(Stereo Matching)작업이 따른다. 이 때문에 이 방식은 모노 카메라 방식에 비해서 알고리즘이 복잡하고 가격이 오르는 단점이 있지만 최근 하드웨어적 성능 향상과 가격 하락에 따른 대중화에 가까워지고 있다. 또한 자동 운전 차에서 비싼 장비인 LiDAR과 물건 카메라의 조합에 대한 대체재로 각광 받고 있다.이 밖에도 자동 운전을 위한 센서 중, 초음파(Super-sonic)센서는 주로 5m이내의 근거리 장애물 감지에 이용되고 능동적 주차 보조(Active Parking Assist)및 자동 주차(Auto Parking)에 응용할 수 있다. 적외선 카메라(Infrared camera)는 야간 운전 때문에 물체를 인식하는 상황 판단을 할 수 있도록 돕는다.주행 환경에 대한 인식을 위해서는 GPS를 이용한 차량의 위치 정보와 미리 구현된 해당 지역별 고 정밀 3D지도를 통해서도 지원할 수 있다. 기술적으로는 이미 오래 전부터 상용화된 기술로 내비게이션과 유사한 기술이며, 현재 차량의 위치 주행 속도 및 방향, 주변의 고정된 지형 지물을 파악할 수 있다. 고 정밀 3D지도는 정적인 주행 환경 정보를 차선별로 구성하고 자동 운전을 위한 전방 도로 환경에 대한 예측과 주변 상황 인식 성능 향상을 가능하게 한다. 이런 지도 데이터와 현재의 차량 주변에서 습득한 레이더 또는 영상 정보를 결합하고 비교·분석하면 보다 정확한 주행 판단이 가능하게 된다.확장성과 보안을 확보한 V2X통신도 차량 간, 그리고 차량과 인프라 간의 정보 공유를 통해서도 보다 신속하고 안전한 교통 흐름 시스템을 지원할 수 있다.

