
테슬라 FSD 테슬라 모델 3에 타고 있는 레드 수량입니다.얼마 전 줌에서 진행된 CVPR 2021 워크숍에서 테슬라 AI 총괄 디렉터인 Andrej Karpathy(안드레커퍼시)의 발표가 있었습니다.
테슬라의 FSD(fullselfdriving) 자율주행에 대한 설명과 왜 최근 Radar(레이더)를 버리고 Vison(비전)만 사용하는지에 대한 내용이 담겨 있습니다. 영어와 식견이 짧아 100% 소화하지 못했지만 아래 관련 내용의 핵심과 개인적인 생각 등을 포스팅해 보았습니다.
그 전에 안드레 카파시는 누구야?안드레 카파시(Andrej Karpathy)

왼쪽) 현재 테슬라 AI 디렉터인 안드레 카파시는 슬로바키아 태생으로 토론토 대학교, 브리티시컬럼비아 대학교에서 컴퓨터, 물리학을 공부했습니다.이후 스탠퍼드에서는 AI, 딥러닝과 관련된 박사학위를 취득했습니다. 그리고 2015년 일론과 함께 테슬라나 일론 마스크에 관심 있으신 분들은 들을 만한 오픈 AI(OpenAI) 설립 멤버가 되겠습니다. 일론은 인공지능의 디스토피아적 미래를 우려해 인류에게 이익이 될 AI 개발, 법규 등을 위해 오픈 AI를 만들었습니다.
그리고 17년도에 테슬라의 AI 디렉터로 앙드레 카파시를 영입했습니다. 테슬라의 자율주행은 이전부터 존재했지만 세계 최고 수준의 인공지능과 딥러닝 전문가를 영입함으로써 다른 경쟁사들과는 차별화 전략(라디아, 레이더에 의존하기보다 비전과 딥러닝에 기반한 자율주행)을 시작하지 않았나 싶습니다.
다음은 CVPR 2021에서 앙드레 카파시의 내용을 발췌하였습니다.(해석 오류가 생길 수 있습니다.) 자율주행 (기계vs.인간) Meatcomputer (인간의 두뇌w)로 운전의 경우 – 사고가 발생하는 긴급 상황에서 인간의 뇌 반응 속도는 250 밀리세컨드 – 운전하면서 숄더, 헤드체크, 미러를 보면서 멀티태스킹 필요 – 운전하면서 ‘드’틈이 인스타그램/카톡체크 (찌르네요w)매일 운전으로 사망자가 upto3700명(미국이죠?)

Silicone computer(AI/자율주행)로 운전하면 -반응속도는 100밀리세컨 이하로 감소(인간보다 60% 빨라짐) -숄더, 헤드체크 각도보다 훨씬 넓은 360도의 주변 사물체크와 인식 -자율주행으로 운전하면서 인스타그램을 하든, 오토톡을 하든 사고발생 비율과 운전에 대한 비용(자율주행 택시와 같은)은 현격히 감소할 것이다.
2004년에 나온 영화, 아우디의 R8 프로토타입 모양의 차가 나오는 영화입니다, 바로 윌 스미스 주연의 아이 로봇의 한 장면입니다. 때는 2035년(지금부터 14년후는 이런세상?)
지금 무슨 말이야? (뭘 하라는 거야?) 운전할 거야? 손으로? 스마트폰과 함께 태어난 포모사피언스처럼 내연기관을 보지 않고 경험할 수 없는 자율주행차 세계에서 태어난 사람들은 위와 같은 여성의 반응을 하는 경우가 100%w
윌 스미스 주연의 아이러봇 아래에서는 테슬라의 FSD 베타(현재 약 2000명의 고객-베타 테스터) 운전 중 일어나는 각 상황에 대한 설명을 보여줍니다.
대표적으로 AEB(autoemergncybraking) 갑자기 사람이나 고라니 지나갈 때 긴급제동을 거는 영상이고, 실제로 저도 오토파일럿만으로도 운전 중 마음대로 차가 제동하는 것을 경험한 적이 있습니다. PMM의 경우는 주차 환경이 아닌 (극단적으로 절벽) 곳에서 실수로 엑셀을 전개해도 바로 개입하여 멈추도록 합니다.
관련 영상에서는 교통이 혼잡한 샌프란시스코를 테슬라 FSD 베타로 유유히 두 손을 떼고 운전하는 장면도 나옵니다. 5단계까지는 기술이나 법규 등 해결해야 할 것이 많지만 FSD는 점점 진보하고 있는 느낌입니다.
테슬라FSD
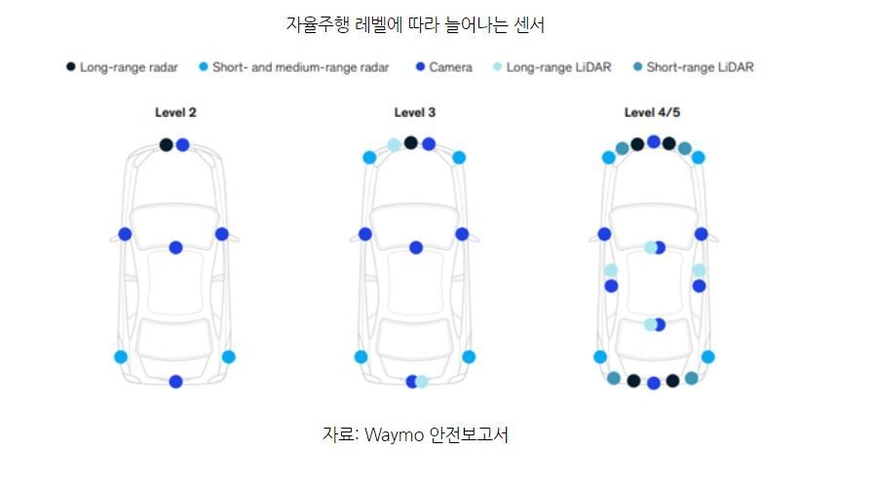
비전과 라이더, 그리고 레이더는 왜 사라졌을까.구글의 자율주행 웨이모, 그리고 테슬라의 FSD 경쟁 구도 정보를 보면 항상 나오는 게 웨이모의 경우는 라이더(Liadar)와 HD맵을 사용해서 바로 5단계로 올리는 게 목표입니다.
이와 비교되는 테슬라의 FSD는 라이더는 버리고 비전과 레이더(radar)를 주로 사용하며 2.5~3단계 어디쯤에 와 있습니다. 이젠 레이더까지 버렸어요!
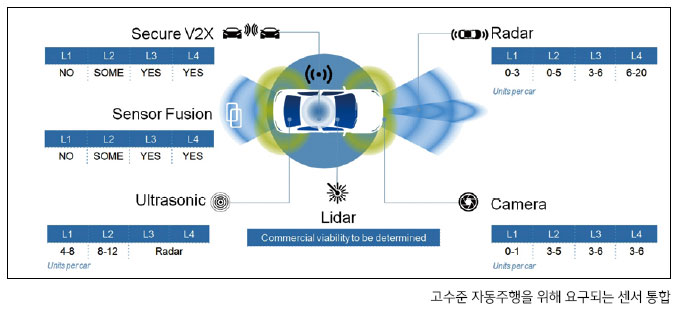
자율주행을 위해서는 다양한 장비를 탑재하는 것이 더 빠르고 안전하지 않을까?-한번비교를해볼까요?
라이더의 경우 HD맵을 월드와이드로 해야 한다
쉽게 둘을 비교하면 웨이모(라이더+HDmap) 고화질 HDmap을 실시간으로 분석하면서 라이더를 통해 자율주행, 그러기 위해서는 무겁고 높은 라이더를 올려 hd맵을 빠르게 연산하는 컴퓨터가 필요합니다. HD맵이 한정된 장소만 자율주행하면 바로 5레벨 가능하지만 전 세계를 대상으로 매핑을 해야 하고 지도를 꾸준히 업데이트해야 한다면 차에 슈퍼컴퓨터가 들어가 있어야 할 것 같습니다.테슬라(레이더+비전) 테슬라의 FSD는 라이다. 없이 8개의 카메라와 레이더를 통해 주변 사물, 차량 간의 거리 인식과 속도를 포착합니다.높고 무거운 라이다(Lidar)를 채택하지 않고 테슬라의 FSD만으로 전 세계에 테슬라 사용자가 (이들의 차량이) 딥러닝을 통해 수많은 데이터를 분석 가공해 다시 업데이트하는 방식입니다. 2, 3, 4단계씩 올라갈 거예요.
테슬라 FSD는 왜 레이더(radar)를 버렸을까.테슬라는 8개의 카메라와 레이더로 자율주행을 하면서 거리인식, 물체의 속도 측정을 해야 합니다. 레이더가 있으면 맨홀 뚜껑 같은 것도 포착하고 기상 여건이 나쁠 때도 주변 파악에 용이한데 왜 레이더를 버렸을까.카파시와 일론 머스크가 비용 절감을 하려고 이런 큰 위험을 했을 리 없습니다.
일론 머스크의 트윗을 보면 레이더와 비전이 충돌(운전 중 어떤 상황에서)하면 무엇에 의지할 것인가?에 대한 자문자답으로 비전이 더 정확하다고 언급했습니다.
퓨어비전(purevision)만으로도 다양한 주행 환경에서 더 우월함을 비전과 레이더 비교 예를 통해 카파시는 설명합니다. 오토파일럿으로 주행하면서 레이더에 의해 전방으로 급브레이크를 밟아야 하는 상황에서 그렇지 않음을 보여줍니다.
그리고 재미있는 예입니다. 저도 그리고 테슬라를 타보는 분이라면 한 번쯤 경험해봤을 ‘팬텀 브레이크’ 현상입니다.
팬텀 브레이크는 오토파일럿 앞에 장애물도 없는데 갑자기 스스로 브레이크를 밟는 상황입니다. 한번 당하고 보면 깜짝 놀라긴 해요. 보통 다리 밑을 지날 때 그런 일이 발생하는 것 같은데, 이것도 레이더와의 비전 충돌로 부정확하게 브레이킹을 지시하는 것이 아닐까 생각합니다.
생각해보면 테슬라는 레이더를 제거하는 모험을 했고 물론 내부에서 여러 차례 시뮬레이션을 했기 때문에 이런 결정을 내렸을 것이고 향후 초기에 오류가 있을 수 있지만 점점 성능이 업데이트 되지 않을까 싶습니다. 하지만 다양한 운전환경에서 만들어지는 주행데이터, 특히 edgecase라 불리는 운전 중 돌발상황(예전 흰색 트럭이 고속도로에 누워 있는 것을 하늘로 착각해 들이받은 것처럼)이 많을수록 자율주행의 완성도는 점점 향상될 것으로 보입니다.
이러한 데이터가 테슬라가 소유한 세계에서 다섯 번째로 강력한 슈퍼컴퓨터에서 수집(라벨링)되고 훈련·재생산되며 테슬라 사용자의 차량(FSD)에 OTA(over theair)에 뿌려져 업데이트됩니다.
무한 리피트인 셈이죠.마마콤(슈퍼컴퓨터) – 애기콤(차량의 FSD/주행데이터) – 다시 마마콤에서 라벨링, 재생산되어 애기콤에 OTA
앞으로 자율주행 기술이 얼마나 발전할지, 그리고 언제쯤 정말 ‘자율주행’하면서 차 안에서 영화를 보고 컨퍼런스콜을 하고 또 로보택시(AI가 운전한다)를 탈 수 있을지 궁금합니다. 공상과학영화에서 본 일이 빨리 눈앞에 펼쳐지길 기대합니다.(물론 그로 인한 도로교통법을 바꾸려면 또 머리 아프지만요)
조만간 FSD도 구독서비스를 출시한다고 하니 구독하고 오토파일럿만의 제 테슬라모3에 바로 시범적용해봐야겠네요.(웃음)
테슬라슈퍼컴퓨터 #테슬라FSD #앤드레카파시 #CVPR #도조 #purevison #테슬라자율주행 #테슬라오토파일럿 #팬텀브레이크 #레이더 #라이더 #퓨어비전 #FSD #andej #karpathy