안녕하세요!!!
오늘은 지난 글에서 간단하게 설명한 카메라 센서에 대해서 알아보도록 하겠습니다.
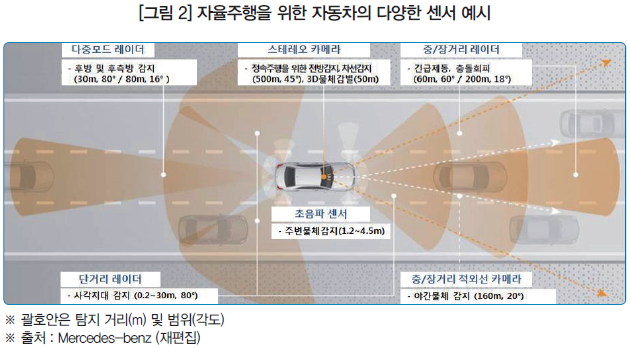
자율주행에 현재 사용되는 센서는 크게 세 가지가 있습니다.그중에서도 가장 생소한 카메라 센서에 대해 알아보겠습니다.
카메라의 원리 카메라 센서의 동작을 이해하려면 먼저 카메라의 원리를 이해해야 합니다.
우리가 자주 사용하는 디지털 카메라의 원리는 다음과 같습니다.빛이 렌즈에 입사되게 되고 이를 전기적 신호로 변환하여 2차원 배열 형태로 표현하게 됩니다.
설명에 앞서 몇 가지 용어를 설명합니다.
- 초점거리 : 렌즈의 중심에서 필름으로 영상이 연결되는 사이의 거리
- 2. 화각 : 화면을 구성하는 각도
- 3. Framerate: 1초간 보여주는 영상 프레임 수 캘리브레이션, 우리가 눈으로 보는 세상은 위치와 높이를 가진 3차원 좌표계의 형태로 존재합니다.한편, 전술한 바와 같이 카메라로부터 얻은 전기적 신호는 2차원 형태의 데이터로 구성되어 있습니다.이 변환을 위해 카메라 캘리브레이션 프로세스를 거치게 됩니다.
- 여기서 캘리브레이션이란 3차원의 점을 2차원으로 변환하고 보다 정확한 계산을 위해 카메라 내부 요인의 파라미터 값을 구하는 과정입니다.
카메라의 내부 파라미터에는 초점 거리, 바, 비대칭 계수가 있습니다.초점거리는 렌즈의 중심과 이미지 센서와의 거리이고, 술집은 렌즈의 중심에서 이미지 센서에 수직으로 내려간 점의 영상 좌표를 의미합니다. 또한 비대칭 계수는 이미지 센서의 Cell Array 축이 기울어진 정도를 의미합니다.
이러한 내부 파라미터 값을 파악하여 렌즈에 생긴 왜곡을 보정하는 과정을 캘리브레이션이라고 합니다.딥러닝 기술을 통한 분석 캘리브레이션을 거친 2차원 데이터는 딥러닝 기술을 통해 물체의 위치와 종류를 파악하는 데 사용됩니다.
카메라 센서에는 주로 CNN 기술이 적용되며 프로세스는 다음과 같습니다.
물체의 특징 추출 – 사람이 직접 라벨링 – 수많은 데이터를 학습 – 모델 출력 – 물체의 종류에 대한 0과 1 사이의 종류 값 추출
이러한 과정을 통해 물체에 대해 인식하게 됩니다.
물체 추적 과정의 이전 과정을 거친 데이터를 시간과 함께 추적하기 위해 다음과 같은 과정을 거칩니다.
지금까지 카메라 센서에서 얻은 데이터를 바탕으로 상황이나 물체를 인식하는 방법에 대해 알아봤습니다.
테슬라 자율주행에 큰 부분을 차지하는 카메라 센서. 과연 라이다 센서 없이도 100% 자율주행이 가능할까요?
오늘은 카메라 센서에 대해 이야기했습니다.
이번에는 자율주행 센서의 라이더 센서에 대해 알아보겠습니다!!고마워요!!