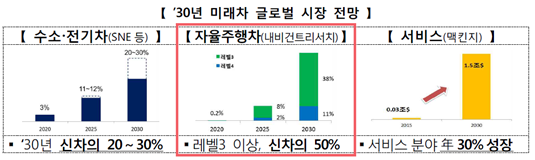
2019년 10월 정부는 2030년 미래차의 세계 선도국가로 도약하기 위한 ‘미래차 산업 비전과 전략’을 발표했습니다. 이에 따르면 2030년 미래차 시장은 자율주행차, 전기차, 수소차, 서비스 산업이 주도할 것으로 전망했습니다.
(보도자료) 미래자동차산업 발전전략, 산업통상자원부
2027년까지 전국 주요 도로 완전 자율주행 상용화를 세계 최초로 달성하는 것을 목표로 하고, 2024년까지 완전 자율주행을 위한 제도와 인프라를 세계 최초로 완비하고 핵심부품, 시스템, 인프라 기술개발 등에 1조7000억원을 투입하여 부품기업의 산업 생태계를 지원할 계획입니다.
Why autonomous driving ?
수많은 SF 영화나 드라마, 소설 속 자율주행 자동차는 단골 소재로 많이 등장했습니다. 1982년 제작돼 2009년 리메이크된 전격 Z작전(Knight rider)부터 첨단 AI가 탑재된 자동차 키트(KITT)는 주인공과 대화해 자율주행이 가능하고 단독으로 차량 절도범을 경찰서로 데려가 버리는 판단을 내리는 등의 기능을 갖고 있으며 이는 자율주행자동차의 목표라고 해도 과언이 아닙니다.

전격 Z 작전 키트(KITT)

전격 Z 작전 키트(KITT)
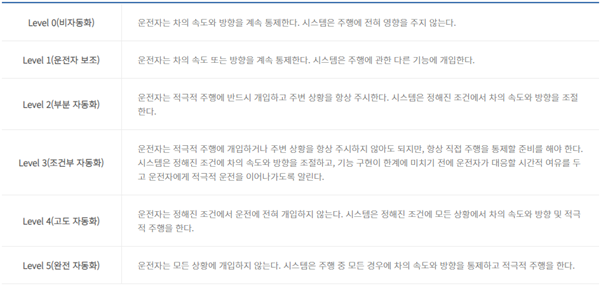
미국자동차기술회(SAE, Society of Automotive Engineers)는 자율주행 자동차의 발전 단계를 6단계로 분류했습니다. Level 0에서 Level 2까지는 운전자가 운전자가, Level 3에서 Level 5까지는 인공지능이 운전의 주도권을 가지고 있습니다. 상용화가 된 차량의 대부분은 Level 0 에서 Level 2 라고 하는 것입니다. 차간거리경고음이나 차선이탈경고음은 Level 0에 속합니다. 경고만 할 뿐 판단 및 조작은 운전자의 몫이기 때문입니다. 상용화된 크루즈 컨트롤은 주행 속도에 개입하기 때문에 Level 1에 해당합니다.
미국자동차기술회의 자율주행 자동차발전단계분류 한국자동차산업협회
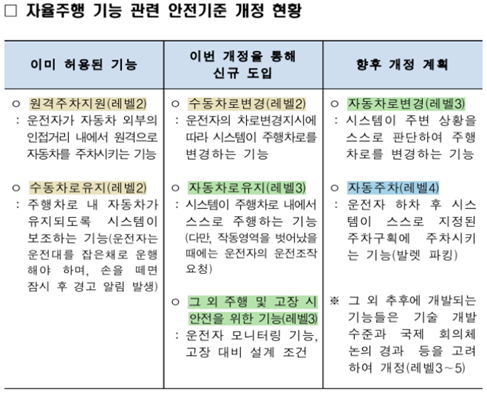
국토교통부는 최근 자율주행차가 안전하게 제작돼 상용화될 수 있도록 부분 자율주행차(Level 3) 안전기준을 세계 최초로 도입했다고 밝혔습니다. 이로 인해, 자동차에 있어서의 보관 유지 기능 탑재 레벨 3의 자동 운전차의 발매 및 판매가 가능해졌습니다.

자율주행기능에 관한 안전기준 개정현황, 국토교통부
다이어트 펌 알아보기 >
자율주행자동차 개발 동향
웨이모(Waymo) 구글은 2009년 자율주행차 개발 계획을 발표하여 자율주행 기업 중 가장 많은 데이터를 보유하고 있다는 평가를 받고 있습니다. 2016년 “Waymo”라는 이름으로 회사를 독립시켰고, 2017년 세계 최초로 Level4 자율주행차를 시연하였습니다. “자동차회사인 도요타 혼다 르노 등과 공동으로 자율주행자동차 개발을 추진하고 있으며 애리조나, 캘리포니아, 파리 등 여러 곳에서 테스트가 진행되고 있습니다” 2019년 중순 웨이모에서 수집한 고해상도 센서 데이터를 오픈소스로 공개하는 등 선두주자의 모습을 보이고 있습니다.
웨이모, Waymo 테슬라 상용화된 차 중 가장 자율주행에 가까운 차를 고르라면 테슬라가 빠질 수 없죠. 테슬라는 일반 자율주행차와 달리 LIDAR센서를 사용하지 않습니다. 1개의 레이더, 8개의 카메라, 12개의 초음파 센서를 이용하여 자동으로 주행하게 됩니다. 완전한 자율주행이라고는 할 수 없으나, 2019년 3월 이후 출시된 차량은 오토파일럿 기능이 탑재되어 FSD(Full Self Driving Capability, 완전 자율주행) 패키지 이용자는 향후 완전 자율주행이 가능해질 때까지 무료 업그레이드를 약속하였습니다. 또한 웨이모의 경우 2020년 초에 1000대가 넘는 차량에서 도로 데이터를 축적하지만 테슬라는 실제 주행 중인 70만 대의 차량을 통해 데이터를 수집할 수 있습니다.

테슬라 Model S, Tesla 현대 (Hyundai) 현대차 그룹은 다양한 분야의 대표자들과 협력하여 자율주행자동차 시장에 큰 투자를 하고 있습니다. 자율주행 분야에서 세계적인 기술력을 보유한 앱티브(APTIV)사와 함께 완전 자율주행 연구를 진행하고 있으며 LIDAR 센서의 대표격인 벨로다인(Velodyne)사와 협력하여 기술개발을 진행하고 있습니다. 올해 미국 라스베이거스에서 열린 CES 2020에서 도심 공유형 완전 자율주행 콘셉트 차량 M비전S를 공개하는 등 자율주행 자동차 개발에 힘을 쏟고 있습니다.
엠비전S, 현대모비스
자율주행인지 기술자율주행은 크게 ‘인지, 판단, 제어’ 과정으로 나눌 수 있는데요, ‘인지’는 다양한 센서를 이용하여 현재 차량의 위치, 진행방향, 속도, 장애물, 신호등을 인식하여 파악하는 기능을 말합니다. 각 센서마다 장점과 단점이 동시에 존재하기 때문에 다양한 센서를 Fusion하는 연구도 활발히 진행되고 있습니다. ‘판단’은 센서의 정보를 바탕으로 주행 경로를 생성해 장애물을 회피하고 긴급 시에 급제동을 거는 등의 판단을 내리는 역할을 합니다. 「제어」는, 인지와 판단에 근거해, 조향, 속도, 제동등을 전자적으로 제어해, 자동 주행을 실현하는 역할을 완수합니다. 그러면 자율주행차의 눈에 띄는 센서에는 어떤 것이 있는지 알려 주시겠습니까?
GPS와 IMUGPS(Global Positioning System)와 IMU(Inertial Measurement Unit, 관성측정장치)는 자율주행자동차의 위치를 파악하는 데 필요합니다. GPS는 Localization센서 중에서 매우 정확한 편이지만 업데이트 주기가 10Hz로 다소 길어서 환경에 따라 사용이 불가능할 수도 있습니다. 반면 IMU는 시간의 흐름에 따른 누적 오차로 인해 위치 추정치의 정확도가 점차 낮아집니다. 그러나 업데이트 주기가 200Hz 이상으로 빨라 실시간으로 요구사항을 충족할 수 있습니다. GPS와 IMU를 잘 조합하면 차량 위치에 대한 정확한 정보를 실시간으로 업데이트 할 수 있습니다.
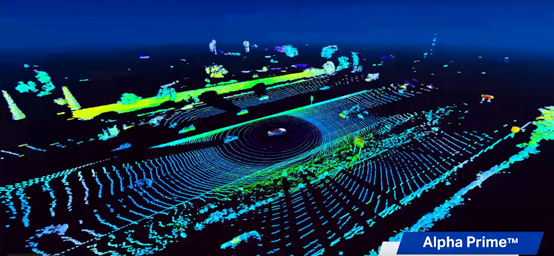
LiDARLiDAR(Light detection and ranging) ᅳᆫ Mapping, Localization, Obstacle Avoidance ᅳᅳᆼ엥에. 레이저를 쏴서 반사될 때까지의 시간을 재서 거리를 측정합니다. 주로 정확도가 높아 HD맵을 생성하고 Localization을 기반으로 장애물을 감지하는 작업에 활용됩니다. 일반적으로 사용되는 Velodyne 64channel 제품은 10Hz 주기로 회전하면서 측정치를 초당 130만 번 불러옵니다.

Velodyne Alpha Prime , Vel odyne
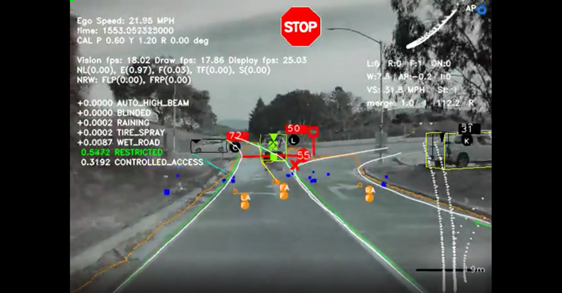
CAMERA 카메라는 주로 차선 감지, 신호 감지, 보행자 감지 등의 개체 인지 및 추적 작업에 활용됩니다. 현재 개발된 자율주행차는 안전성을 높이기 위해 1080p 카메라를 8개 이상 장착합니다. 이렇게 장착한 카메라로 차량의 앞, 뒤, 양 옆에 있는 개체를 감지하고 인지하고 추적합니다. 카메라는 대략 60Hz의 주기로 작동하며, 차량에 장착된 카메라 전체에서 생성되는 원본 데이터는 초당 1.8GB에 달합니다.
RADAR/SONAR RADAR(Radio Detectioning And Ranging, 레이더)와 SONAR(Sound Navigation and Ranging, 초음파) 센서는 주로 장애물 회피를 위한 마지막 수단으로 사용됩니다. RADAR나 SONAR로부터 생성된 데이터는, 차량 이동경 노선상에서 가장 가까운 대상까지의 거리 뿐만이 아니라, 속도 정보도 포함하고 있습니다. 어떤 대상이 가까이 있다고 감지해서 충돌 위험이 있다고 판단되면 브레이크를 밟거나 방향을 틀어 장애물을 피해요. 따라서 RADAR와 SONAR에서 생성된 데이터는 가공하는 경우가 많지 않으며, 메인 연산 파이프라인을 거치지 않고 제어장치로 즉시 전달하여 방향을 전환하여 브레이크를 밟거나 안전벨트를 당기는 ‘긴급한’ 동작을 하게 됩니다.
테슬라 카메라, 레이더, 초음파 센서를 이용한 자율주행 namuwiki
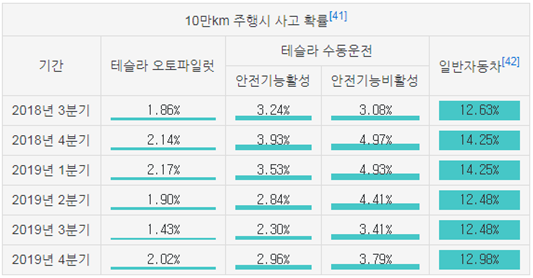
위험 자율주행의 실현이 가까워짐에 따라 우려의 목소리도 높아지고 있습니다. 대표적인 예로 사고의 위험성, 윤리적 문제가 있습니다.지난 테슬라 트레일러 충돌 사고, 2018년 우버 보행자 충돌 사고 등 크고 작은 사고가 발생했습니다. 이 사고로 인해 안전성이 확보될 때까지 시험을 중단해야 한다, 기술 발전을 막으면 안 된다 등의 의견이 분분합니다. 그러나 자율주행 사고의 경우 대부분 운전자가 오토 파일럿 기능을 맹신한 나머지 운전자가 자율주행 기능을 감시하는 역할을 하지 못한 것이 원인이었습니다. 테슬라는 분기마다 안전 보고서를 공개하고 있어요.
테슬라 안전 보고서, namu.w i ki
위 표를 보면 일반 자동차보다 오토파일럿을 사용하여 운전하면 6.5배, 오토파일럿 없이 안전기능만 활성화하여 운전하면 4.8배, 안전기능도 무효화한 테슬라 자동차만 운행해도 약 3.4배의 안전성이 있다고 합니다.
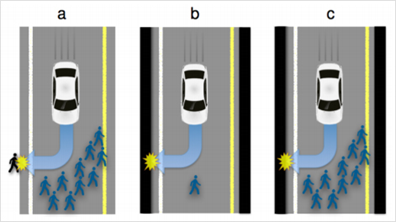
윤리적 문제에는 대표적으로 트롤리 딜레마가 있습니다. 트롤리 딜레마는 오래 전부터 결론이 나지 않아 논란이 되고 있는 난제입니다. 「MIT테크놀로지 리뷰」에서는 다음과 같이 너무 갑작스러워서 자동 운전을 멈출 수 없는 상황을 상정하고 있습니다.
트롤리딜레마(출전:http://www.ndsl.kr/ndsl/issueNdsl/detail.do?techSq=78))
상황 A는 직진하면 10명을 치고 방향을 돌면 1명을 칩니다. 상황 B는 직진하면 보행자 1명이 치이고 방향을 돌면 운전자 본인 1명이 크게 다치거나 사망하는 상황입니다. 상황 C에서는 계속 직진하면 몇 명이 다치거나 사망하거나 방향을 돌면 운전자 본인 1명만 죽거나 다치는 상황이 됩니다. 이런 경우 ‘다수 사람이 막힐 경우 본인이 다치거나 사망하게 되고 남을 돕기 위해 나를 해치는 상품을 살 이유가 없다.’라고 생각하게 됩니다. 자율주행자동차 상용화를 위해서는 충분하고 다양한 논의가 이루어져야 하지만 트롤리 딜레마와 같은 난제로 자율주행기술의 발전을 가로막아서는 안 됩니다.
참고문헌 리오 샤오샨 외 3명, 남기혁 외 2명, ‘자율주행차 만들기’, 에이콘, 2019.01.02
인공지능, 빅데이터, AR 및 VR, 360도 콘텐츠 및 온라인 마케팅 전문기업 데이터 흐름! 궁금하시면 언제든지 문의하세요.

다이어트 펌 알아보기 >